publications
2024
-
 Well-Connected Set and Its Application to Multi-Robot Path Planning.IEEE International Conference on Robotics and Automation (ICRA), 2024
Well-Connected Set and Its Application to Multi-Robot Path Planning.IEEE International Conference on Robotics and Automation (ICRA), 2024 -
 Decentralized Lifelong Path Planning for Multiple Ackerman Car-Like RobotsIEEE International Conference on Robotics and Automation (ICRA), 2024
Decentralized Lifelong Path Planning for Multiple Ackerman Car-Like RobotsIEEE International Conference on Robotics and Automation (ICRA), 2024


2023
-
 Toward Efficient Physical and Algorithmic Design of Automated Garages.IEEE International Conference on Robotics and Automation (ICRA), 2023
Toward Efficient Physical and Algorithmic Design of Automated Garages.IEEE International Conference on Robotics and Automation (ICRA), 2023 - IROSEfficient Heuristics for Multi-Robot Path Planning in Crowded EnvironmentsIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
-
 Optimal Allocation of Many Robot Guards for Sweep-Line CoverageIEEE International Conference on Robotics and Automation (ICRA), 2023
Optimal Allocation of Many Robot Guards for Sweep-Line CoverageIEEE International Conference on Robotics and Automation (ICRA), 2023


2022
-
 Sub-1.5 Time-Optimal Multi-Robot Path Planning on Grids in Polynomial TimeIn Proceedings of Robotics: Science and Systems, 2022
Sub-1.5 Time-Optimal Multi-Robot Path Planning on Grids in Polynomial TimeIn Proceedings of Robotics: Science and Systems, 2022 -
 Polynomial time near-time-optimal multi-robot path planning in three dimensions with applications to large-scale uav coordination.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
Polynomial time near-time-optimal multi-robot path planning in three dimensions with applications to large-scale uav coordination.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022 -
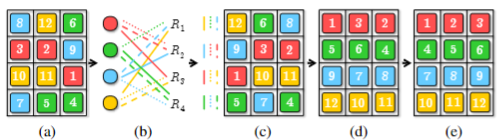 Rubik Tables Stack Rearrangement and Multi-Robot Path PlanningAnnual Allerton Conference on Communication Control and Computing, 2022
Rubik Tables Stack Rearrangement and Multi-Robot Path PlanningAnnual Allerton Conference on Communication Control and Computing, 2022 -
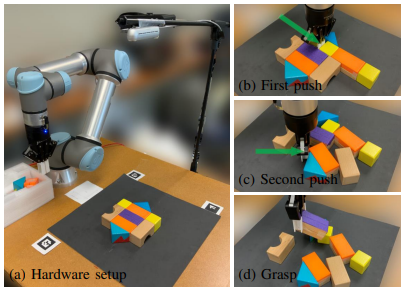 Interleaving monte carlo tree search and self-supervised learning for object retrieval in clutterIEEE International Conference on Robotics and Automation (ICRA), 2022
Interleaving monte carlo tree search and self-supervised learning for object retrieval in clutterIEEE International Conference on Robotics and Automation (ICRA), 2022




2021
-
 Spatial and temporal splitting heuristics for multi-robot motion planningIEEE International Conference on Robotics and Automation (ICRA), 2021
Spatial and temporal splitting heuristics for multi-robot motion planningIEEE International Conference on Robotics and Automation (ICRA), 2021 -
 Team RuBot’s experiences and lessons from the ARIAC.Comput. Integr. Manuf., 70, 102126, 2021
Team RuBot’s experiences and lessons from the ARIAC.Comput. Integr. Manuf., 70, 102126, 2021

